從零開始 在電子產品世界論壇DIY四軸飛行器的完整進程帖
我是論壇的新人,也是一個狂熱的電子和飛行器愛好者。我決定開一個帖子,記錄我從零開始DIY一臺屬于自己的四軸飛行器的全過程。這個項目會涉及電路設計、單片機編程、傳感器應用、機械結構、無線通信和電源管理等多個方面,希望能和大家一起交流學習,也歡迎各位大神隨時指點和建議!
第一階段:理論與規劃(第1周)
在動手之前,充分的準備至關重要。我花了整整一周時間在論壇里搜索學習前輩們的經驗帖,并最終確定了我的項目目標和基本方案。
- 目標定位:我的目標是制作一臺穩定、可編程、具備基礎航拍功能的微型四軸飛行器(軸距約250mm),側重于學習過程而非極限性能。
- 核心部件選型:
- 飛控主板:這是大腦。經過對比,我選擇了市面上開源且資料豐富的F4系列飛控,它集成STM32F4主控、MPU6050六軸陀螺儀加速度計,并預留了氣壓計、磁力計接口,性價比高,適合學習。
- 電調與電機:動力核心。選用4個XXD 2204 2300KV無刷電機,搭配4個好盈20A BLHeli電調。KV值決定了電機的轉速特性,這個搭配適合小尺寸槳葉。
- 槳葉:選用5045三葉正反槳各一對,提供足夠的升力。
- 機架:為了減重和個性化,我決定自己用碳纖維板切割一個“X”型機架。圖紙已在論壇的機械加工區分享。
- 電池與電源模塊:選用3S 11.1V 2200mAh 25C鋰聚合物電池,并需要一塊5V/12V穩壓模塊為飛控和接收機等供電。
- 遙控與接收:使用我已有的FrSky Taranis X9D遙控器,搭配X8R接收機,通信可靠。
- 圖傳與攝像頭(可選):后續階段再加裝,初步選定5.8G 600mW圖傳發射和迷你攝像頭。
- 工具準備:電烙鐵、熱風槍、萬用表、示波器(借的)、螺絲刀套件、熱熔膠槍、3D打印機(用來打印一些支架和配件)等。
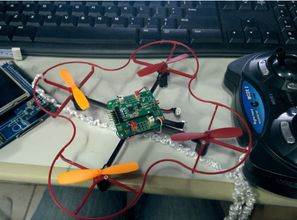
第二階段:硬件組裝與焊接(第2-3周)
這是最考驗動手能力的環節。
- 機架組裝:按照圖紙,將切割好的碳纖維板、鋁柱用螺絲組裝起來。過程順利,但要注意螺絲不要擰得太緊以免壓裂碳纖維。機架非常輕且堅固。
- 動力系統焊接:
- 將電機固定在機臂上,注意電機的轉向和對應的槳葉安裝順序(正反槳)。
- 重點難點:焊接電調、電源分線板與電池插頭。我采用了“XT60插頭 -> 電源分線板 -> 4個電調”的并聯方式。焊接時一定要確保焊點飽滿、牢固,并用熱縮管做好絕緣。特別注意正負極! 我用萬用表反復檢查了多遍。
- 將電調的信號線(三根細線)焊接到飛控板對應的電機輸出焊盤上(M1-M4)。
- 飛控與外圍設備連接:
- 將接收機的SBUS輸出線連接到飛控的對應串口。
- 連接穩壓模塊的輸出(5V)到飛控的供電輸入。
- 暫時空置的接口:I2C(留給磁力計等)、UART(留給數傳或GPS,后續擴展)。
遇到的問題與解決:首次上電測試時,一個電調冒煙了!嚇出一身冷汗。經檢查,是焊接時有一小段焊錫絲殘留在分線板上造成了短路。深刻教訓:焊接后必須徹底清理焊渣,并用放大鏡檢查。更換電調后問題解決。
第三階段:軟件配置與調試(第4周)
硬件是軀體,軟件是靈魂。
- 固件燒錄與基礎配置:
- 使用USB線連接飛控到電腦,在Betaflight Configurator地面站中刷入最新的穩定版固件。
- 進行端口設置(激活對應串口用于接收機)、配置接收機協議(SBUS)、設置電機排序(非常重要,必須與實際物理順序一致)。
- 校準加速度計和陀螺儀。
- PID參數初步調整:先使用默認的PID參數。Betaflight的默認參數已經很不錯,適合首次試飛。
- 電機測試:務必卸下槳葉! 在地面站中啟動電機,逐個測試電機是否按正確順序和方向轉動。發現電機3轉向反了,通過在地面站中設置“電機方向反轉”輕松解決(也可以交換電調上任意兩根電機線實現)。
- 遙控器通道校準:確保遙控器的搖桿通道映射正確(AETR1234),并且中位、行程量校準準確。
第四階段:試飛與調參(第5周及以后)
激動人心的時刻!
- 首次室外試飛(空曠無風場地):裝上槳葉,做好安全防護。解鎖,輕輕推油門……飛行器成功離地!但存在明顯的左右晃動和“洗澡”現象(快速上下震蕩)。
- 問題分析與調參:根據現象和論壇里“PID調參指南”帖子的指導,判斷是P值(比例增益)偏高。逐步降低Roll和Pitch軸的P值,每次調整后試飛觀察。經過幾次迭代,抖動明顯改善,懸停變得穩定。
- 進階功能測試:
- 測試了“定高模式”(需要氣壓計)和“頭鎖模式”,工作基本正常。
- 嘗試了簡單的翻滾特技動作,響應迅速。
當前狀態與未來計劃
目前,我的四軸飛行器已經可以穩定飛行約8分鐘。這是一個巨大的里程碑!
下一步計劃:
1. 加裝FPV設備:安裝攝像頭和圖傳發射,在遙控器上加裝屏幕,實現第一人稱視角飛行。
2. 探索數傳與地面站:添加數傳電臺,實現飛行中實時調整參數和傳輸遙測數據到電腦地面站。
3. 嘗試自動駕駛功能:研究ardupilot或inav等固件,實現航點規劃、自動返航等更高級的功能。
心得體會
這次DIY讓我對嵌入式系統、自動控制原理和射頻通信有了更直觀深刻的理解。論壇里各位朋友的帖子、尤其是那些分享失敗經驗的帖子,給了我巨大的幫助。電子產品DIY的魅力就在于,你不僅創造了一個設備,更是在解決問題的過程中創造了自己的知識體系。
我會持續更新這個帖子,分享FPV安裝和自動駕駛功能的實現過程。所有用到的原理圖、3D打印文件、配置文件,我都會整理后分享到論壇的下載區。
感謝“電子產品世界”這個平臺!歡迎大家提問、討論,我們一起讓飛行器飛得更高更穩!
---
(本帖將持續更新……)
如若轉載,請注明出處:http://www.dn80v.cn/product/49.html
更新時間:2026-05-28 01:30:39